
| サービス範囲 | 仕様打合せ→見積→現地立ち上げ |
|---|---|
| 施工対象 | 加工機 |
| 施工分類 | 生産性向上、省人化 |
内容
従来よりお取引のあるお客様よりへ協働ロボットを活用した自動化システムを導入させていただきました。多品種少量生産が進み、従来のような大掛かりな自動化システムに加えて、加工機への投入・取出しといった簡単な作業の自動化が進んでおります。お役立ち情報でもご紹介させていただきました、FANUC製 協働ロボット CRXシリーズを活用した事例をご紹介させていただきます。
【Before】
加工機が複数台並んだラインにおいて、加工機へのワークの投入・取出しでお困りごとをお抱えでした。センタリング加工機と、後工程の加工機の間にスペースが少なく大掛かりな投入が難しいため、自動化が進んでいない状況でした。
〇課題
・スペース
→スペースが狭く、大掛かりなシステムの導入は難しい。
・プログラミング
→多品種少量生産のため、ワーク変更に伴うプログラミングの変更が必要。
・再設置性
→スペースが狭く清掃や段取り替えでロボットシステムを移動させる必要有。
移動後の再設置の際に精度が出しづらい。
生産数の変動により従業員の確保も難しく、非常にお困りの状況でした。
【After】
当社より、FANUC製の協働ロボット「CRXシリーズ」を活用したロボットシステムを導入させていただきました。
省スペース、プログラミング、再設置性といったお客様のお困りごとをしっかり解決できるシステムとなっております。
【システム構成】
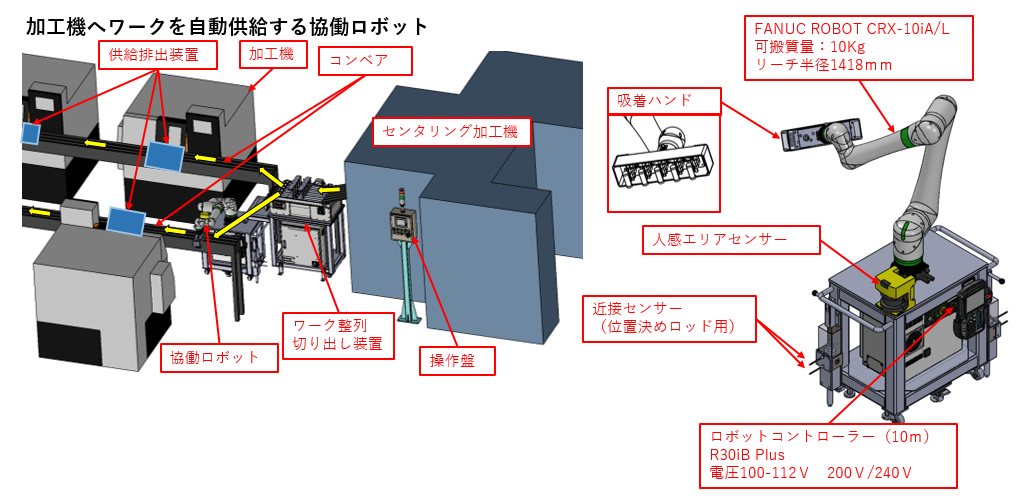
〇ロボット
・FANUC製 CRXシリーズ
型式:CRX-10iA/L
可搬:10kg
リーチ:1418mm
〇人感エリアセンサー
〇吸着ハンド
〇ロボット架台
〇近接センサー
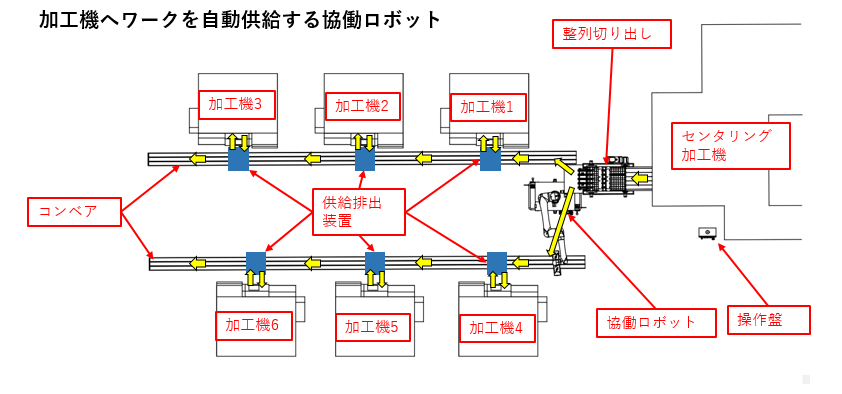
【自動化の内容】
センタリング加工機から出てきたワークが整列切り出し装置により切り出され、
協働ロボットがワークを吸着して左右のコンベアにワークを供給。
コンベアによっては運ばれたワークは、各加工機前のワーク供給装置により
加工機内部へ搬送。加工済みのワークは排出装置によりコンベアまで排出され、
コンベアに乗って搬送されていきます。
【提案のポイント】
協働ロボットのメリットである「省スペース」を実現するために、システム全体のリスクアセスメントを実施し、人感エリアセンサーにて対策を実施。
結果、安全柵なしでも稼働ができる「協働ロボットシステム」を実現しました。
「再設置性」を向上させるために、近接センサーを設置し、設置後の位置補正を簡単にできるような構成にしております。
工場内に自動化が進んでいない工程はございませんでしょうか。
「省スペース」「単純反復作業」など、従来自動化が難しかった工程に関しても、協働ロボットを活用することで、自動化が可能です。
当社であれば、お客様にあわせた最適なご提案が可能ですので、お困り事等をお抱えのお客様がおられましたら、お気軽にお声かけください。