産業用ロボットハンドによる重量ワークの工程間搬送・位置決め
| サービス範囲 | 産業用ロボットの導入 ⇒ ロボットハンドの設計・製作 ⇒ ティーチング ⇒ セットアップ |
|---|---|
| 施工対象 | 産業用ロボットのハンド |
| 施工分類 | 重量ワークの工程間搬送と位置決め |
| 施工納期 | 3ヵ月 |
| 業界 | 輸送 |
| 概要 | 重量部品をロボットでハンドリングするためのハンドの設計製作 |
内容
改善前:before
この輸送業界のお客様の生産ラインではコンベアで流れてきた約500kgもある重量物のワークを取り付ける工程がありました。現状では作業員がこの重量ワークのクレーンを操作し、特定の位置までハンドリングを実施。要求される±5mmの位置決めを実現するために多くの時間を使っていました。他に時間がかかる要因として、毎回アイボルトを取り付け、フック付きのチェーンで吊っていたため、段取りの手間も時間がかかる一因でした。
また、重量物のクレーン作業は、ワーク落下や人との接触の危険性や、有資格者が必要なため作業員が限定されるという問題もあり、時間的・再現性・安全面と多方面からの改善が求められていました。
改善後:after
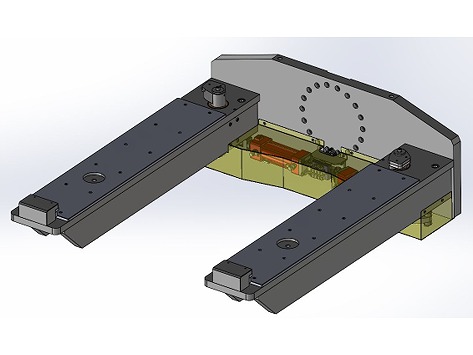
上記3つの問題点である❶作業時間の短縮、❷有資格者:属人生の排除、❸作業の安全性の向上、を同時に解決する方法として産業用ロボットに特注ロボットハンドをご提案。この重量ワークの形状に合わせた特殊なロボットハンドを羽根田商会にて設計・製作を実施。
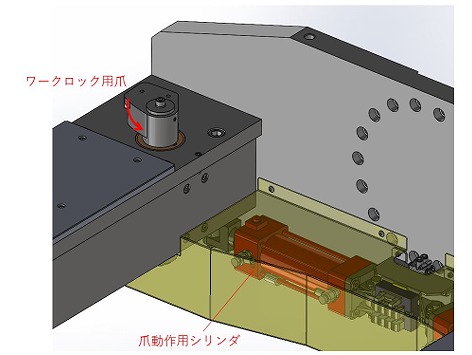
設計にあたっては、位置決め精度とロボットだけでハンドリングが可能なことを重視しました。産業用ロボットとロボットハンドを採用することで、繰り返しの作業精度を高くすることができ、位置決めにかかる時間が減少させることができました。また、作業時間だけでなく、チャックはエアシリンダとカムを使用するため、作業者がワークに近づくことなくハンドリングが可能。その結果、重量ワークの落下や人との接触の可能性が大幅に低減され、安全性も向上しました。産業用ロボットが作業を行うため、クレーンなどの有資格者がいなくても、ティーチングによって作業が実施できるため、再現性も実現。このように改善前と比較して、あらゆる問題を解決することを実現いたしました。
最終的に今回の産業用ロボットと特注ロボットハンドの導入によってサイクルタイムが約45秒改善し、生産効率を向上させることができたため、お客様にも大変満足いただくことができました。